/***************************************************************************************
* Lin_Enc_01.ino 04-29-2014 unix_guru at hotmail.com @unix_guru on twitter
* http://arduino-pi.blogspot.com
*
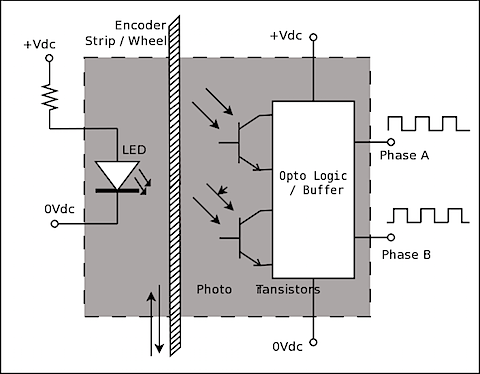
* This sketch allows you to run two salvaged printer carriages for X/Y axis using their
* linear encoder strips for tracking.
* Both interrupt routines are below, but for the sake of demonstration, I've only set up
* the X-AXIS for now.
*
*****************************************************************************************/
#include <Wire.h>
#include <Adafruit_MotorShield.h>
#include "utility/Adafruit_PWMServoDriver.h"
#define frontstop = 100 // Right most encoder boundary
#define backstop = 3600 // Left most encoder boundary
// Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// Select which 'port' M1, M2, M3 or M4. In this case, M1
Adafruit_DCMotor *myMotor = AFMS.getMotor(1);
const int encoder1PinA = 2; // X-AXIS encoder 1 on pins 2 and 4
const int encoder1PinB = 4;
volatile int encoder1Pos = 0;
const int encoder2PinA = 3; // Y-AXIS encoder 2 on pins 3 and 5
const int encoder2PinB = 5;
volatile int encoder2Pos = 0;
boolean CarriageDir = 0; // Carriage Direction '0' is Right to left
byte spd = 220; // Carriage speed from 0-255
int newpos = 0; // Taget position for carriage
int posrchd = 1; // Flag for target reached
int Pos1, Pos2;
void setup() {
Serial.begin(115200);
Serial.println("Linear Encoder Test 04-29-2014");
AFMS.begin(); // Set up Motors
myMotor->run(BACKWARD); // Bring carriage to home position.
myMotor->setSpeed(spd);
delay(100);
myMotor->run(FORWARD); // Bring carriage to home position.
myMotor->setSpeed(0);
attachInterrupt(0, doEncoder1, CHANGE); // encoder pin on interrupt 0 (pin 2)
// attachInterrupt(1, doEncoder2, CHANGE); // encoder pin on interrupt 1 (pin 3)
randomSeed(analogRead(0));
}
void loop() {
static int oldPos1, oldPos2;
uint8_t oldSREG = SREG;
uint8_t i;
cli();
Pos1 = encoder1Pos;
Pos2 = encoder2Pos;
SREG = oldSREG;
if(Pos1 != oldPos1){
Serial.print("Encoder 1=");
Serial.println(Pos1,DEC);
oldPos1 = Pos1;
}
if(Pos2 != oldPos2){
Serial.print("Encoder 2=");
Serial.println(Pos2,DEC);
oldPos2 = Pos2;
}
//sweep_carriage();
if(posrchd) { // If target has been reached clear flag, and get new target
newpos = random(200,3500);
posrchd = 0;
}
posrchd = go_to_target(newpos);
}
/***************************************************************************************
The following code was taken from http://forum.arduino.cc/index.php?topic=41615.20;wap2
to utilize the fast port based encoder logic. Thank you Lefty!
please go there for a full explanation of how this works. I have truncated the comments
here for brevity.
***************************************************************************************/
void doEncoder1() { // ************** X- AXIS ****************
if (PIND & 0x04) { // test for a low-to-high interrupt on channel A,
if ( !(PIND & 0x10)) { // check channel B for which way encoder turned,
encoder1Pos = ++encoder1Pos; // CW rotation
PORTD = PIND | 0x40; // set direction output pin to 1 = forward,
}
else {
encoder1Pos = --encoder1Pos; // CCW rotation
PORTD =PIND & 0xBF; // Set direction output pin to 0 = reverse,
}
}
else { // it was a high-to-low interrupt on channel A
if (PIND & 0x10) { // check channel B for which way encoder turned,
encoder1Pos = ++encoder1Pos; // CW rotation
PORTD = PIND | 0x40; // Set direction output pin to 1 = forward,
}
else {
encoder1Pos = --encoder1Pos; // CCW rotation
PORTD =PIND & 0xBF; // Set direction output pin to 0 = reverse,
}
}
PORTD = PIND | 0x80; // digitalWrite(encoderstep, HIGH); generate step pulse high
PORTD = PIND | 0x80; // digitalWrite(encoderstep, HIGH); add a small delay
PORTD = PIND & 0x7F; // digitalWrite(encoderstep, LOW); reset step pulse
} // End of interrupt code for encoder #1
void doEncoder2(){ // ************** X- AXIS ****************
if (PIND & 0x08) { // test for a low-to-high interrupt on channel A,
if (!(PIND & 0x20)) { // check channel B for which way encoder turned,
encoder2Pos = ++encoder2Pos; // CW rotation
PORTB = PINB | 0x01; // Set direction output pin to 1 = forward,
}
else {
encoder2Pos = --encoder2Pos; // CCW rotation
PORTD =PIND & 0xFE; // Set direction output pin to 0 = reverse,
}
}
else { // it was a high-to-low interrupt on channel A
if (PIND & 0x20) { // check channel B for which way encoder turned,
encoder2Pos = ++encoder2Pos; // CW rotation
PORTB = PINB | 0x01; // Set direction output pin to 1 = forward,
}
else {
encoder2Pos = --encoder2Pos; // CCW rotation
PORTB =PINB & 0xFE; // Set direction output pin to 0 = reverse,
}
}
PORTB = PINB | 0x02; // digitalWrite(encoder2step, HIGH); generate step pulse high
PORTB = PINB | 0x02; // digitalWrite(encoder2step, HIGH); used to add a small delay
PORTB = PINB & 0xFD; // digitalWrite(encoder2step, LOW); reset step pulse
} // End of interrupt code for encoder #2
/***************************************************************************************
go_to_target() determines the distance and direction from current position to target
position, then maps speed to decellerate close to the target so as not to overshoot.
***************************************************************************************/
int go_to_target(int target)
{
int temp = 0;
int delta = abs(Pos1-target); // Distance to target
spd = map(delta,3600,0,255,150); // Decellerate as you get closer
if(target < 3600 && target > 100) {
if(Pos1 < target) {
myMotor->run(FORWARD);
myMotor->setSpeed(spd);
temp = 0;
} else if(Pos1 > target) {
myMotor->run(BACKWARD);
myMotor->setSpeed(spd);
temp = 0;
} else temp =1;
}
return temp;
}
/***************************************************************************************
sweep_carriage() is just a test routine to track back and forth testing overshoot.
I will likely remove it soon.
***************************************************************************************/
void sweep_carriage()
{
if(CarriageDir == 0) { // Carriage Moving Right to Left
if (Pos1 < 3600) {
myMotor->run(FORWARD);
if (Pos1 > 3400) {
myMotor->setSpeed(spd-80);
} else myMotor->setSpeed(spd);
} else {
myMotor->setSpeed(0);
CarriageDir = !CarriageDir;
}
} else { // Carriage Moving Left to Right
if (Pos1 > 100) {
myMotor->run(BACKWARD);
if (Pos1 < 300) {
myMotor->setSpeed(spd-80);
} else myMotor->setSpeed(spd);
} else {
myMotor->setSpeed(0);
CarriageDir = !CarriageDir;
}
}
}

 And to appease the readers of Hack A Day ....
And to appease the readers of Hack A Day ....